
【技術】為什么自行車不會倒?這個數學問題在自行車誕生的兩百年后才告解決
2017-03-09 by:CAE仿真在線 來源:互聯網
他幼年家庭破碎,自行車成為他唯一的樂趣。他以優秀的成績從MIT畢業,但也曾失意退出學術圈,甚至為廁紙制造機公司工作,但30年后,他關于自行車運動背后的數學規律的工作終于大白于天下,如今他的工作有了新的動力。

圖片來源:Adam Glanzman/Nature
在康奈爾大學助理教授吉姆·帕帕佐普洛斯(Jim Papadopoulos)位于波士頓家里的地下室里,斜靠著七輛自行車,有的掉漆了,有的輪胎沒氣了。作為他結婚禮物的自行車車架早已被厚厚的塵埃覆蓋。他說:“我在搬家時丟棄了大部分實驗用的自行車。”這就意味著,留下的自行車對他來說都有著特殊的意義。他說:“這些是我平時騎的。”
62歲的帕帕佐普洛斯對自行車著迷了大半生,甚至達到了忘我的地步。在青年和大學時代,他曾參加過業余自行車賽,但他還對自行車背后更深層次的知識著迷。在騎車時他總是要思考背后的數學問題,其中最主要的是:自行車為什么不會倒?到底是什么看不見的力量讓騎車人在踩踏板的時候還保持平衡?為什么要先把把手向右轉才能使車傾向左邊并向左轉?以及,怎樣使自行車在無人駕駛時還保持平穩行駛?
他年輕時在康奈爾大學當工程師,期間就努力鉆研了這些問題。然而,他大部分的設想都沒有發表,導致他最終退出了學術界。上世紀90年代末,他淪落到去一家生產廁紙制造機器的廠家工作。“如果最后沒人發現你的作品,繼續工作也毫無意義。”他說。
但是終于有人發現了他的工作。2003年,他當年在康奈爾的老朋友和同事,工程師安迪·魯伊納(Andy Ruina),給他打了個電話,電話里說,一個來自荷蘭的科學家阿倫·施瓦布(Arend Schwab)去了他的實驗室,有意幫他重啟關于自行車穩定性的研究。
“吉姆,我們需要你。”魯伊納告訴帕帕佐普洛斯。
兩個輪子就好了
這幾名研究者開始一起攻克這個困擾了科學家一個世紀的難題——自行車如何維持平衡,他們的結果發表在了《美國科學院院刊》(Proceedings of Royal Society)和Science雜志上。通過這些基礎研究,他們力求把更高層次的科學知識注入全球市值達500億美元的自行車工業。長久以來,這個行業主要依靠人們的直覺和經驗,而不是嚴謹的數學。他們的研究成果可以帶動這個行業所急需的創新想法,或許可以幫助設計師們發明更穩定、更安全的新一代腳踏與電動自行車。此外,關于自行車的見解還有潛力在其他行業發揮作用,例如假肢和機器人制造。
“所有人都會騎自行車,但沒人知道我們是怎么騎上自行車的。”在加州大學戴維斯分校讀體育機械學的工程師蒙特·哈伯德(Mont Hubbard)說。“單純從學者的角度來看,關于自行車的研究本身就很有趣,但同時這些研究也很實用,因為它們能夠幫助人們出行。”
對于機械工程師來說,關于自行車的難題有著特別的吸引力。魯伊納說:“我們機械工程師平時打交道的就是牛頓三定律,相當于還停留在數學、物理和工程緊密結合、密不可分的19世紀。”他說,自行車是該領域中為數不多的一個“碰巧跟日常生活有聯系的數學問題”。
第一個老式自行車的專利可以追溯到1818年。經歷不斷的嘗試和失敗以后,自行車在20世紀初的時候進化成了類似現在的樣子。但是,這么多年來,竟沒有多少人想過它們為什么能運轉,以及是怎么運轉的。William Rankine,一個曾分析過蒸汽機的蘇格蘭工程師,在1869年首次提出了“反轉向”現象,即要想向左轉,騎車人必須先微微地把車把向右側轉動,才能讓車身向左傾并成功左轉。
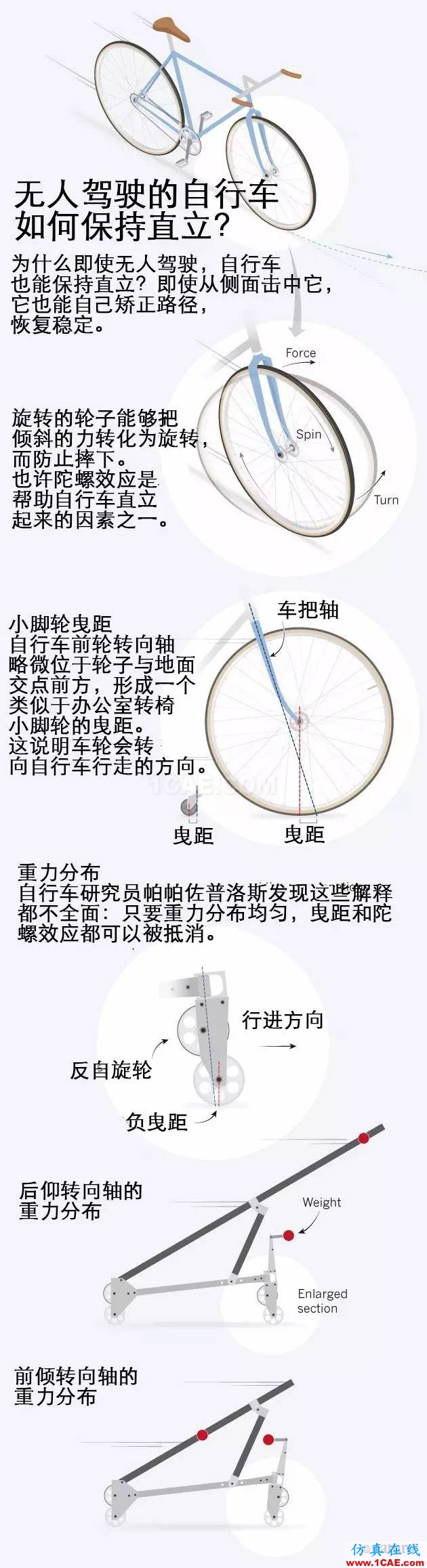
傾斜和車把方向的聯系賦予了自行車最神奇的特征:在行進時可以讓車身平衡。如果猛推一下無人駕駛的自行車,它可能會先踉踉蹌蹌地行駛一陣,但總能恢復平穩向前行駛。1899年,英國數學家Francis Whipple推導出最早的,也是最權威的自行車數學模型之一,就是為了探索這種自動穩定性。Whipple把自行車模擬為四個固定的物體:兩個輪子、一個上面坐著人的車架,以及車前身加把手,這四個部分由兩條軸和一個中樞連接起來,并受到重力的作用。
把一輛自行車四個部分測得的數值代入模型,自行車的運動軌跡就像分解動畫一般一幀一幀地放出來。此時工程師就可以用一種叫特征值分析(eigenvalue analysis)的手法來檢驗自行車的穩定性,就像檢驗飛機設計一樣。1910年,基于上述的分析,數學家Felix Klein和Fritz Noether跟理論物理學家阿諾爾德·索末菲(Arnold Sommerfeld,沒錯,就是量子力學的開山人物之一,海森堡、泡利等量子力學大佬都是他的學生)一起研究了陀螺效應,即旋轉的輪胎不會傾斜的現象對自行車的影響。把一輛自行車向左推,快速旋轉的前輪就會向左轉,自行車能保持直立可能出于這個原因。
然而,1970年4月,化學家、大眾科學作家戴維·瓊斯(David Jones)否認了這個理論。他在一篇發表在Physics Today的文章中描述了自己的研究:他造出了一系列根據索末菲等人的理論根本無法駕駛的自行車,在其中一輛自行車上,他安裝了一個反向旋轉的前輪,從而有效地抵消陀螺效應。根據索末菲等人的理論,這輛自行車應該無法保持平衡才對,然而他不用手也可以幾乎毫不費力地駕駛。
這個發現促使他探索其他可能的影響因素。他將自行車前輪和商場購物車里能夠轉向手推方向的小腳輪做了對比。自行車的前輪相當于小腳輪,因為輪子與地面接觸的點總是在把手軸后5至10厘米處。這個距離稱為“曳距”(trail)。瓊斯發現,當曳距過大時自行車會穩到騎著別扭,而曳距為負值的自行車則十分危險——它會讓你在放開把手的一瞬間跌落。
瓊斯總結道,當單車開始傾倒時,腳輪效應會使車的前端在重力下向回轉,因而保持直立。他認為,小腳輪曳距是對自行車自穩性的唯一解釋。在他四十年后發表的的回憶錄里,他把這個發現當做自己一生中最重要的成就之一。“我現在被譽為現代自行車理論之父。”他宣稱。
準備就緒
那篇文章,給當時還生活在俄勒岡州科瓦利斯市的青年帕帕佐普洛斯留下了深刻印象。他有著對數字的天賦,但他童年時的家庭十分不幸。他的父親邁克爾是一個英國應用數學家,原本在俄勒岡州立大學工作,卻因為反對越南戰爭而沒獲得終身教授職位。接下來的十年中,邁克爾一直在法庭上跟讓他失業的大學做斗爭,而他的家人只能從垃圾堆里撿破爛來維持生計。70年代初,吉姆的母親自盡了。“在我剛剛開始認識這個世界,認識我自己的時候,”帕帕佐普洛斯說,“我的家庭就破碎了。”
在這時候,自行車給了他慰藉。他留著齊肩長發,在小鎮里到處踩著他的Peugeot AO8。他不再去上學,成績一落千丈。17歲的時候他輟了學,離開了家。但在他放棄學業之前,一位老師給他讀了瓊斯的文章。
帕帕佐普洛斯覺得這篇文章有趣又撲朔迷離。他想:“我必須要學會這些東西。”他在加州伯克利附近游蕩了一個夏天,利用空余時間讀著George Arfken的《物理學家的數學方法》教材。接著他在俄勒岡州尤金市的一家膠合板廠工作,從此掙到了足夠的錢,買下了他每周末比賽時騎的傳奇版Schwinn Paramount自行車。1973年,他去了英國利物浦為生產自行車架的Harry Quinn公司工作,但他表現并不好,導致Quinn開除了他。
1975年,帕帕佐普洛斯回到俄勒岡,在俄勒岡州立大學上了一年學后轉到麻省理工學院讀機械工程的本科,并取得了優秀的成績。埃克森石油公司(Exxon)資助他完成了固體力學的博士學位。他的本科導師Michael Cleary非常看好帕帕佐普洛斯在學術界的前途,他告訴埃克森公司內部雜志的作者:“我覺得吉姆會成為一名大學教授——我當然希望他留在麻省理工。”
然而,帕帕佐普洛斯卻有其他的打算。他一直在研究Whipple的自行車模型和瓊斯的文章,并在某個暑假參加了在美國地質調查局的實習。在這里,他第一次遇到了后來的合作伙伴安迪·魯伊納(Andy Ruina)。
他們馬上成為了親密的朋友。當魯伊納得到了康奈爾大學的教職后,他就雇傭了帕帕佐普洛斯為博士后。“我們無時無刻不在討論自行車,但我沒想到他會這么嚴肅地對待它。”魯伊納說。
帕帕佐普洛斯說服魯伊納,也許自行車公司像石油公司一樣有興趣為學術研究提供經濟支持。于是他開始向自行車制造商籌款:“捐5000美金,你就可以成為康奈爾自行車研究項目的贊助方!我們有志研究關于自行車的一切,從輪胎強度到雨中剎車失靈問題等各個方面的問題!”
帕帕佐普洛斯的第一個目標,就是研究到底是什么因素導致有的自行車比其他自行車更平穩。他坐在辦公室里,細細研讀了30篇別人發表的自行車運動公式,得出的結論是他對這些研究之拙劣感到很吃驚。公式是把自行車車架的幾何構造與操控過程聯系起來的第一步,但是這些論文中提出的每個新模型都很少引用之前的作品,許多論文錯誤連篇而且難以互相對比,他只能從零開始。
經過一年的努力后,他自認為掌握了明確的一系列公式。現在,到了讓這些式子助力他的研究的時候了。“我會盯著這些等式坐上好幾個小時,嘗試找出它們背后的含義。”他說。
首先他根據瓊斯提出的關鍵變量——曳距重寫了自行車公式。根據瓊斯的結論,當曳距為負值時自行車本該會不平穩,但他的計算結果卻顯示并非如此。他在當時撰寫的一篇報告中畫出了一輛從把手向前伸出一個重物的怪異自行車:“重心稍微前移可以彌補輕微負值的曳距……似乎自行車的自穩性并不是由單一變量決定的。”
這個發現意味著,自行車容易駕駛與否,并不能由一個簡單的法則決定。曳距或許有些作用,陀螺效應和重心或許也有些作用。對于帕帕佐普洛斯來說,這一發現有重大啟示。最早的車架建筑師只是碰巧發現了一個感覺可行的設計,然后就一直被局限在小范圍的幾種設計方案中,但其實,或許還有大量沒被嘗試過的幾何形狀可以改革自行車的設計。
衰落
兩年后,魯伊納已經資助不起帕帕佐普洛斯了。除了自行車制造商Murray,他們得到的僅有的兩家贊助來自Dahon和Moulton,兩家小輪自行車的制造商,大概是因為小輪自行車特殊的設計使它們比較難騎。魯伊納開玩笑說,他們應該把項目名稱改為 “折疊自行車研究項目”, 真是黑色幽默。
雖然帕帕佐普洛斯在自行車的數學理論方面取得了進展,但他只發表了一篇作為第一作者的論文。“我覺得,發現新事物和鉆研細節比把它們寫下來有趣多了。”他說。既得不到資金,又發表不出論文,他的自行車研究生涯漸漸結束了。1989年,他把他的自行車裝進一輛面包車,開去了他當時妻子工作的伊利諾伊州,在學校和工廠忍受著他厭惡的工作。在空余時間他為《硬核自行車愛好者》雜志建立并維護了自行車科學愛好者的電子郵件名單,也幫忙給電視真人秀Junkyard Wars造了一輛能塞進行李箱的車。
2001年,來自麻省理工的工程師,發明了最早的現代躺車(recumbent bicycles)之一的David Wilson邀請帕帕佐普洛斯與他合著《自行車科學》(Bicycling Science)的第三版。然而,當時的帕帕佐普洛斯卻正被債務和責任壓得喘不過氣。他連第一章都沒能寫完發給Wilson,后來直接連郵件都不回復了。Wilson覺得自己被背叛了。“他是個非常聰明的人,”Wilson說,“但他總是無法完成任何事。”不過,帕帕佐普洛斯說他其實完成了任務——不過比預期的耗時長了兩年罷了,當時心力交瘁的他正經歷一場難熬的離婚。
回歸自行車
在康奈爾,魯伊納繼續研究自行車。他把之前研究團隊對自行車的見解應用在了一個新的領域——機器人上。他認為,如果自行車可以不借助控制系統而展現如此優雅的穩定性,那或許也可以設計出一種能如此行駛的極簡行走機器。1998年,他跟荷蘭代爾夫特理工大學的施瓦布的研究生學生Martijn Wisse合作,制造出了一個可以完全不用馬達走下緩坡的兩腳機器,它能把能量儲存在擺動的手臂里。在此基礎上加上幾個電子馬達,一個可以在平地上行走的節能機器人就誕生了。
2002年,施瓦布決定跟魯伊納一起過年假,然后他們討論到了以前的自行車研究項目。這時魯伊納給帕帕佐普洛斯打了個電話,并上門造訪了他。“這是我第一次見到那個天才。”施瓦布說。
隨著路上的自行車越來越多,施瓦布覺得不可理喻的是竟然沒有人發表過正確的自行車公式組,更不用說把這些公式應用在解決自行車設計的難題上。他和一位現在位于荷蘭特溫特大學的工程師Jaap Meijaard分別獨立推理出了自己的公式,這與帕帕佐普洛斯的公式完全相符。他們在韓國一個工程會議上展示了最終的自行車公式,然后四人聯合發表了結果。
現在的問題就是要證明,這不僅僅是個數學發現。施瓦布和學生花了一年時間建造出了一個負值曳距極小,卻具有自穩性的自行車。這輛車看起來就像是單腳滑板和蹺蹺板的結合體,一個重物從前輪向前伸出,還有一個反向旋轉的車輪來抵消陀螺效應。在一個它滑行的視頻中,你能看到它先傾斜并向右轉,但接著就自己恢復平穩。這個實驗證實了帕帕佐普洛斯的觀點,即自行車穩定與否由多種因素共同決定。
然而,在自己的發現在30年之后終于為更多人所知的時候,帕帕佐普洛斯卻忍不住感到失望。“這并沒有如我們想象那般改變一切。”他說。自行車架的設計仍然年年如一。“大家都還無法打破常規思考。”他說。盡管如此,其他的研究者們也跟上了他們組的軌跡,在2010年,終于舉辦了一場關于自行車與電動車動力學的會議。會議召集了來自世界各地的工匠,其中一些人也制造了怪異的實驗性自行車,用來驗證設計原理。
去年這項會議的組織者是來自加州大學伯克利分校的工程師Jason Moore,他力求尋找自行車車架的幾何形狀與操作簡便程度之間的聯系。這項工作受啟發于關于飛行員的軍事研究。Moore通過在裝滿傳感器的自行車上進行一系列演習,監測了車把方向,傾角和速度,創建了一個人類控制自行車的模型。為了只通過車把來平衡和騎行(而不是重心的移動),他不得不穿上剛硬的馬具把自己綁在自行車上。這項研究證實了自行車越平穩越好駕駛這一長期以來的假設,或能為車架建筑師們提供優化設計的工具。
這同時也引入了一個難題:實驗實測車把所需的轉矩是Whipple自行車模型預測的二至三倍。這個差異或許源于模型里沒有包含的輪胎摩擦和彎曲,但并不能蓋棺定論。為便于實驗,Moore和他的同事們建造了一個可以平衡自身的機器人自行車。“只要有個機器人自行車,你就可以做很多瘋狂的實驗,不用讓真人騎上去冒險了。”他說。(他之前的一個控制實驗要讓木棍猛地側擊自行車,還要保持平衡。)其他許多無人駕駛的自行車機器人需要靠內部的陀螺來保持直立,但這個機器人只靠車把。Moore已經把它寄給施瓦布做更深入的研究了。
今天,施瓦布擁有了帕帕佐普洛斯夢寐以求的實驗室,帕帕佐普洛斯也為能夠與他合作感到不勝感激。“這是我能想象到的最美好的東西。”他說。施瓦布其他的研究項目包括一個將把向運動跟平衡運動分離的“線把向” 自行車,還有一個可以在低速行走時保持平穩的 “輔助把向” 自行車。他還發明了一種能展現自穩性的后輪轉向躺車,用放大的前輪來增大陀螺效應的放大的前輪。后轉向躺車最大的好處是需要的車鏈比傳統躺車更短,因而能更有效地傳遞能量。“有人之前嘗試過,但并不能駕駛。”施瓦布說。
淡出學術圈已久的帕帕佐普洛斯如今在位于波士頓的東北大學任教,開始再次嘗試進入學術圈。他開始建立合作關系,驗證一些蟄伏已久的關于為什么自行車在高速行駛時會搖晃的猜想。他相信,能夠用一個消音器吸收坐桿處的震動,從而減少晃動。他跟同事和學生也由此開始探索一系列其他問題,有些甚至跟自行車本身沒有太大關系了。
在他的地下室,帕帕佐普洛斯打開了一個褐色備案柜的抽屜,翻起了皺巴巴的馬尼拉文件夾。上邊標記著“胎壓”,“生物動能”,和“康奈爾”。他拿出一本教科書:“運動生理學?我從未認真讀過。”他說著,把書丟到一邊。在抽屜深處,他找到厚厚一本文件夾的自行車研究方案,上面標記著“未完成”。
Papadopoulos沉思了一秒,把標簽改成了“基本未完成” 。
轉自:環球科學ScientificAmerican
相關標簽搜索:【技術】為什么自行車不會倒?這個數學問題在自行車誕生的兩百年后才告解決 機械設計培訓 機械設計課程 機械設計視頻 機械設計技術教程 機械設計資料下載 SolidWorks UG inventor軟件應用 Fluent、CFX流體分析 HFSS電磁分析 Ansys培訓 Abaqus培訓




